
|
1344| 0
|
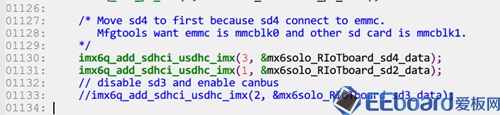
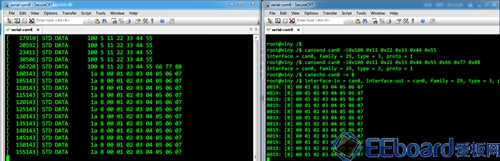
RioTboard canbus驱动测试及应用编程 |


 发表于 2014-8-23 00:46:43
发表于 2014-8-23 00:46:43






关闭
站长推荐
站长推荐 /2
/2 
ICP经营许可证 苏B2-20140176 苏ICP备14012660号-2 苏州灵动帧格网络科技有限公司 版权所有.

Powered by Discuz! X3.4
Copyright © 2001-2020, Tencent Cloud.
|
1344| 0
|
RioTboard canbus驱动测试及应用编程 |
/2
Powered by Discuz! X3.4
Copyright © 2001-2020, Tencent Cloud.